
Volvo ControlTech, sponsored by Volvo Construction Equipment, is a forward-thinking project envisioning the future of in-cab operator environment in the year 2030. It integrates a Site Management system for managers, Remote Control for operators, and a Modular System for cab interiors, focusing on how technological advancements will reshape vehicle experiences and construction site efficiency.
In Collaboration With: Haoran Xu, Freddie Jiang
Instructors: Chris Chapman, Nathan Allen, Todd Masilko


By the year 2030, we anticipate a completely new generation of operators taking the helm of construction equipment.
Our challenge was to delve into what these future operators will need within their operational environment, the cab. This task is set against a backdrop where autonomous vehicles and robotics technologies are becoming increasingly advanced.
Concurrently, the demographic profile of those driving this construction equipment is undergoing significant changes. It's a noted fact that many highly skilled operators are of an older generation, making it challenging to attract younger individuals to the field of construction machinery operation.
However, this shift in technology presents a real opportunity to not only enhance the functionality of construction equipment but also to transform it into a different kind of job - one that appears more aligned with high-tech and advanced skills.
Our goal is to reimagine the job in such a way that it becomes appealing to the next generation of operators, who have been raised in a world surrounded by technology, video games, and computers. In doing so, we aim to make the equipment not only more capable but ensure that the experience is attractive and engaging, beyond mere capability enhancements.
It's 8 am in 2030, and Max finishes his morning conference with the construction team. They've discussed the day's tasks and planned the most efficient approach. As the meeting ends, Max gets a notification about a new task assigned to him.

This integration significantly enhances operational efficiency and safety, as operators can manage equipment from a distance, reducing the risk of onsite accidents. The drone provides a bird's-eye view, allowing for precise, real-time monitoring of the site, which is instrumental in making informed decisions quickly. Consequently, this technology streamlines the construction process, improves safety, and elevates the overall effectiveness of site operations, making the operator's job more manageable and efficient.
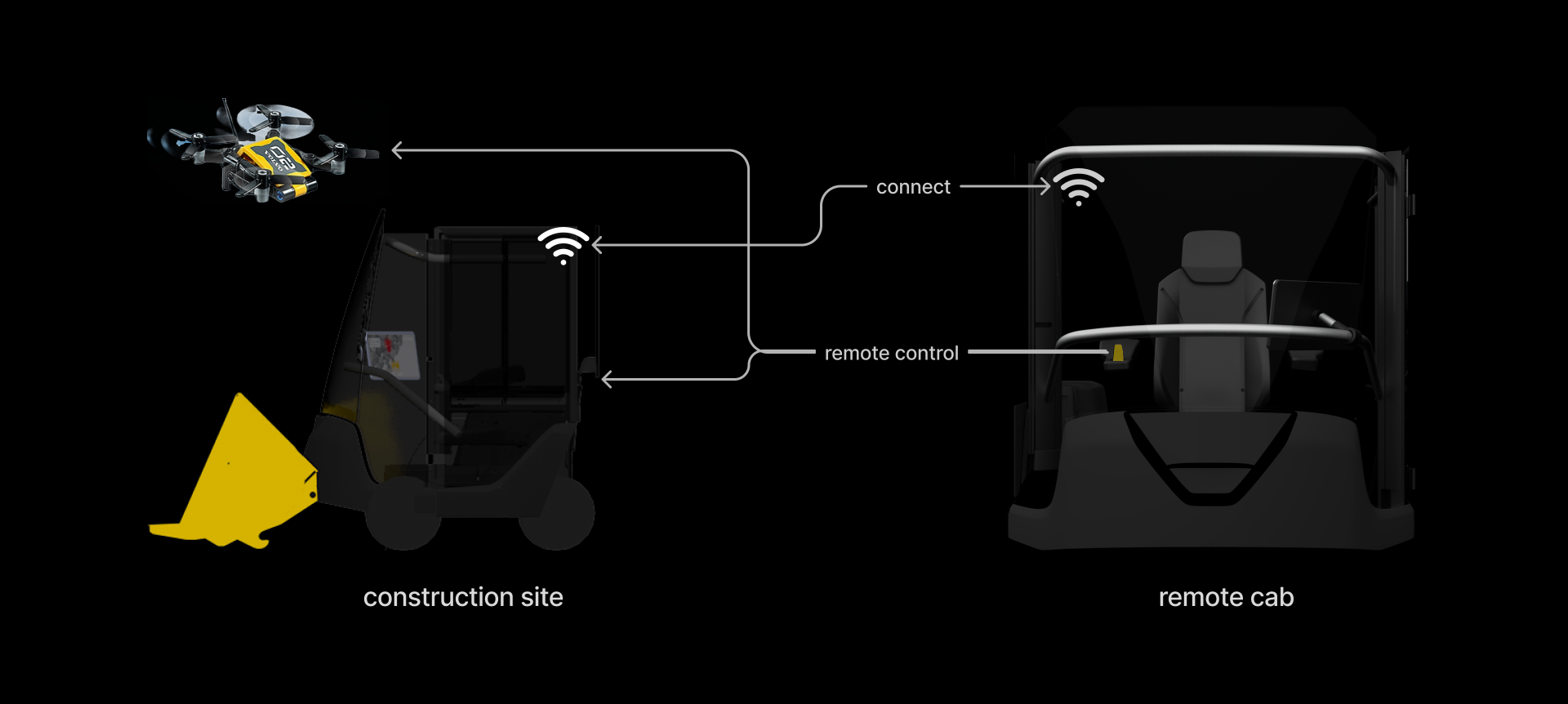
Enhanced connectivity and diverse vantage points on construction sites significantly increase safety and efficiency through our software integration.
Our redesigned controller simplifies operation by mimicking the wheel loader's movements, merging movement and rotation controls for a more natural experience. This synchronization of tilt and rotation with joystick movements allows operators to control the machine with precision and ease, making tasks like bucket loading and unloading straightforward with a simple press of the top button.

Utilizing multiple camera angles from both the machine and drones offers a comprehensive view of the construction site. This not only enhances operational awareness for vehicle operators and the site team but also significantly improves safety and the efficiency of the construction process.

Featuring a live video feed and graphical displays of the machine's status, including loader arms position and load weight, this enhancement offers critical data at a glance. It greatly improves operator safety and facilitates the training and automation of construction processes, making precision tasks more manageable.

Experiencing haptic feedback through seat vibrations or tilts when encountering obstacles or veering off the road provides operators with immediate physical cues. This direct feedback enhances the driving experience by increasing awareness and reaction times, further ensuring operator safety and contributing to a smoother operation.

To best simulate the remote control experience we’re trying to create. We built a unity demo, using VR and game controllers to replicate the visual and haptic feedback.
(User interface and video were created by Haoran Xu)

(Animations, renders and text descriptions were created by Freddie Jiang)
The hardware backbone for both the Site Management and Remote Control systems. It allows rapid adaptation to new technologies and offers customization based on operational needs.
(Animation: With modular system, operators can easily replacing old components with our newly designed ones.)
We believe everyone is unique. So does the habit of using these machines. Thanks to the modular system, we can easily move the controller from one side to another.
(Animation explaining the versatility of our modular controllers.)
Apart from that, other things can also relocate on the rails.
(An animation of change screen location and remove the steering wheel)
Just be careful not to attach screen at the blind spots

The remote cab could set up the exact same way as the onsite cabs. In this way, we could achieve the maximum level of simulation.


1. Remote control for demolition task

2. There is a warning saying an on-site loader need emergency takeover

3. This is the current on-site cab which need takeover

4. Remote cab operator quickly setup and manually takeover the machine
A greater picture behind this, is that now it’s possible to use one remote cab to control different types of machines, as we are getting more vehicles remote controlled. Operators can easily configure remote cabs according to task category.



Site Management facilitates efficient construction operations, Remote Control ensures safe and versatile equipment handling, and the Modular System provides adaptability and upgradability to integrate both functionalities seamlessly.